Arduino voor beginners
Ingrediënten
- Arduino + breadboard
- Ledlamp
- USB-kabel
Verbindingen

Bereiding
Stop de led met de lange pin in digitale output 13 en de korte pin in GND (er vlak naast).
Laad de onderstaande code op naar je bord.
Code
void setup() {
// gebruik pin 13 van de digitale "output".
pinMode(13, OUTPUT);
}
void loop() {
//zet de voltage van pin 13 hoog (5V)
digitalWrite(13, HIGH);
//laat dit zo gedurende 1 seconde
delay(1000);
//zet de voltage van pin 13 laag (0V)
digitalWrite(13, LOW);
//laat dit zo gedurende 1 seconde
delay(1000);
}Muziek maken met Arduino en Piëzo
Ingrediënten
- Arduino + breadboard
- 2 kabeltjes
- Piëzo-speaker
- USB-kabel
Verbindingen
- Sluit de piëzo-luidspreker aan op je breadboard.

- Verbind één kabel met GND aan de stroomvoorziening.

- Verbind de andere kabel met digitale output 11.

Code
- Maak een nieuw bestand en bewaar het als "muziek".
- Klik op het kleine pijltje rechts in de IDE en kies voor "Nieuw tabblad".

- Noem het tabblad "pitches.h".
- Plak de onderstaande code in het tabblad.
/************************************************* * Public Constants *************************************************/ #define NOTE_B0 31 #define NOTE_C1 33 #define NOTE_CS1 35 #define NOTE_D1 37 #define NOTE_DS1 39 #define NOTE_E1 41 #define NOTE_F1 44 #define NOTE_FS1 46 #define NOTE_G1 49 #define NOTE_GS1 52 #define NOTE_A1 55 #define NOTE_AS1 58 #define NOTE_B1 62 #define NOTE_C2 65 #define NOTE_CS2 69 #define NOTE_D2 73 #define NOTE_DS2 78 #define NOTE_E2 82 #define NOTE_F2 87 #define NOTE_FS2 93 #define NOTE_G2 98 #define NOTE_GS2 104 #define NOTE_A2 110 #define NOTE_AS2 117 #define NOTE_B2 123 #define NOTE_C3 131 #define NOTE_CS3 139 #define NOTE_D3 147 #define NOTE_DS3 156 #define NOTE_E3 165 #define NOTE_F3 175 #define NOTE_FS3 185 #define NOTE_G3 196 #define NOTE_GS3 208 #define NOTE_A3 220 #define NOTE_AS3 233 #define NOTE_B3 247 #define NOTE_C4 262 #define NOTE_CS4 277 #define NOTE_D4 294 #define NOTE_DS4 311 #define NOTE_E4 330 #define NOTE_F4 349 #define NOTE_FS4 370 #define NOTE_G4 392 #define NOTE_GS4 415 #define NOTE_A4 440 #define NOTE_AS4 466 #define NOTE_B4 494 #define NOTE_C5 523 #define NOTE_CS5 554 #define NOTE_D5 587 #define NOTE_DS5 622 #define NOTE_E5 659 #define NOTE_F5 698 #define NOTE_FS5 740 #define NOTE_G5 784 #define NOTE_GS5 831 #define NOTE_A5 880 #define NOTE_AS5 932 #define NOTE_B5 988 #define NOTE_C6 1047 #define NOTE_CS6 1109 #define NOTE_D6 1175 #define NOTE_DS6 1245 #define NOTE_E6 1319 #define NOTE_F6 1397 #define NOTE_FS6 1480 #define NOTE_G6 1568 #define NOTE_GS6 1661 #define NOTE_A6 1760 #define NOTE_AS6 1865 #define NOTE_B6 1976 #define NOTE_C7 2093 #define NOTE_CS7 2217 #define NOTE_D7 2349 #define NOTE_DS7 2489 #define NOTE_E7 2637 #define NOTE_F7 2794 #define NOTE_FS7 2960 #define NOTE_G7 3136 #define NOTE_GS7 3322 #define NOTE_A7 3520 #define NOTE_AS7 3729 #define NOTE_B7 3951 #define NOTE_C8 4186 #define NOTE_CS8 4435 #define NOTE_D8 4699 #define NOTE_DS8 4978
- Ga naar het hoofdtabblad (met de naam "muziek").

- Plak de onderstaande code in het tabblad. Je kan de code naar eigen wens uitbreiden.
De instructie "tone" doet was ze zegt. Ze stuur een geluid naar pin 11. De "500" geeft de tijdsduur aan (500 milliseconden of een halve seconde). Het middelste getal geeft de "toonhoogte" weer. De verschillende noten en hun waarde kan je terugvinden in het tabblad "pitches.h".#include "pitches.h" void setup(){ } void loop() { tone(11,1047,500); delay(1000); tone(11,1175,500); delay(1000); tone(11,1319,500); delay(1000); tone(11,1047,500); delay(1000); } - Laad de code op naar je bord.
Ander melodietje nodig?
#include "pitches.h"
void setup(){
}
void loop() {
tone(11,330,500);
delay(500);
tone(11,349,500);
delay(500);
tone(11,392,500);
delay(500);
tone(11,349,500);
delay(500);
tone(11,294,1000);
delay(500);
tone(11,440,500);
delay(500);
tone(11,392,500);
delay(500);
tone(11,392,500);
delay(500);
tone(11,349,500);
delay(500);
tone(11,262,500);
delay(3000);
}


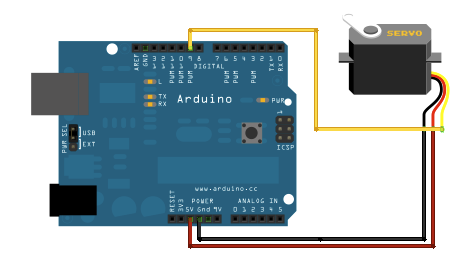 Servomotor aansturen met Arduino (voor wie nog wat meer wil, niet verplicht...)
Servomotor aansturen met Arduino (voor wie nog wat meer wil, niet verplicht...)